The Soaring Engine V2: Wave and Convergence (Softcover)
Soaring Engine Volume 2: Wave and Convergence
by: G Dale

THE SOARING ENGINE Volume Two
by: G Dale
Wave and Convergence

General Description
The Soaring Engine V2 - Wave and Convergence - The first volume covered the basis of using ridge and thermal lift to soar in both flatland and mountain terrain.
Volume 2 goes on to describe the more advanced techniques required when flying in convergence or wave systems.
Illustrated with clear simple diagrams, this book is a primer for soaring pilots flying anything from a paraglider to high performance sailplanes.
The Soaring Engine is a series of text books that explain how the sky produces the energy that pilots can exploit to fly cross country. Volumes one and two cover the various forms of lift: ridge, thermal, wave and convergence, and how best to use them in flat land or mountain environments. Volume one is also available in German. Volume three is all about the pilot: what he or she needs to know and how best to manage the personal resources that are so necessary for sporting success. Volume four is a primer for pilots who are learning to operate the exquisite but complex high performance sailplanes that are now available.
With hundreds of simple clear diagrams and a consistent page layout that delivers the information in bite-sized chunks this series is a straightforward guide for any pilot interested in how the sky works and how to use it.
The Soaring Engine V2 price varies depending on selection above. Free Domestic and Flat Rate International Shipping for all Soaring Engine Books.
| Author | G Dale |
| Dimensions | 5.98" X 9.01" |
| Page Count | 144 Pages |
| Edition |
First Edition Copyright 2016 |
Convergences
- A Temperate Sea Breeze
- Carpet Wind Convergences
- Convergence Between Similar Air Masses
- Convergence Soaring: Summary
Wave
- An Introduction to Wave Soaring
- How Wave Works
- Climbing Into the Wave
- Get Established in the Wave
- Soaring Cross Country in the Wave
- Patterns in the Sky
- Soaring Cross Country Under the Wave
- Complications and Curiosities
- Soaring and Wave Flying
- Wave Soaring: Summary

After a childhood spent building (and crashing) model aeroplanes, G Dale finally started learning to fly aged 20 with the Dorset Gliding Club. Ten years later he landed his first gliding job with Lasham Gliding Society and progressed rapidly to the role of cross country instructor thanks to the support of Phil Phillips, the manager of LGS at that time. With a Janus C to fly and a constant supply of keen students, and with the help of the British Gliding Association’s National coaches John Williamson and Chris Rollins he was able to rapidly develop the required skill set to become that rare bird: a soaring coach.
Since then he’s followed the endless summer, working for the British Gliding Association, The Gliding Association of New Zealand and the Gliding Federation of Australia, always teaching cross country flying. He’s also flown and worked at various gliding clubs around the world: at Nympsfield as Chief flying instructor, at Booker again as CFI, at Lasham as DCFI and soaring coach, and at Glide Omarama as head coach, with visits to Minden, Serres, Takikkawa, Narromine, Lake Keepit and many other clubs as a peripatetic soaring instructor and mountain flying coach.
All this has supported a racing career: having won several British national championships he is currently a member of the British Gliding team. He flew at the 2019 European gliding championships where he earned his first silver medal whilst his team partner Tom Arscott achieved first place. G is also a coach for the British Women’s gliding team and for the British Junior team.
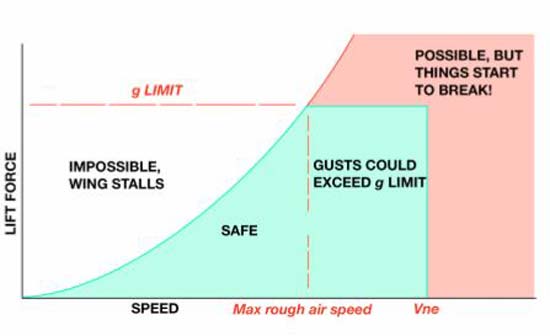
A Simplified Sketch of the Flight Envelope
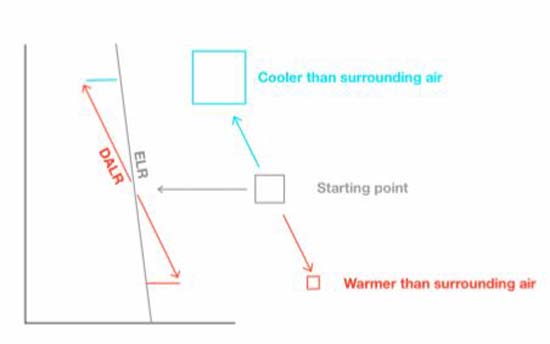
Stability:The DALR Versus the ELR
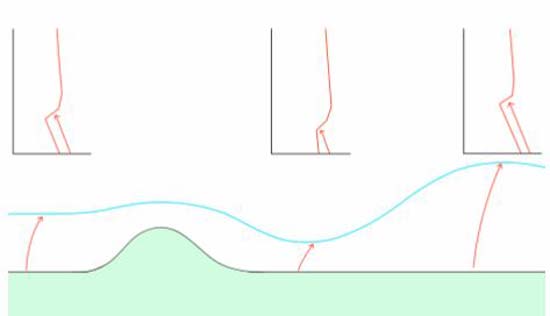
Temperature Profile of the Waving Air Mass at Trough and Crest
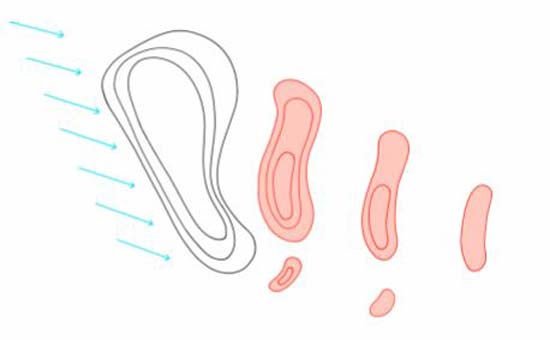
The Back of the Trigger Gernerates the Wave
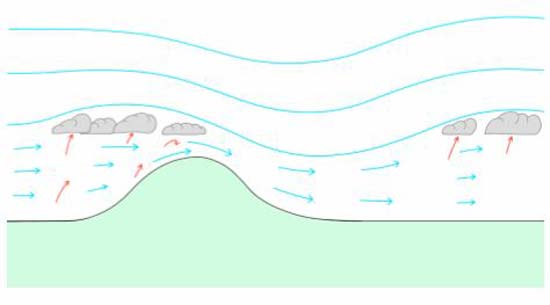
The Thermals are out in Front of the Ridge
Wind Shear Truning Thermals into Rotor Therals
International Customers: In an effort to reduce shipping costs if ordering The Soaring Engine books alone, select “International Shipping” above. If you have more items in your shopping cart, select “Domestic Shipping”. Otherwise, your shipping charges will be doubled.
The Project
There are many books on “how to fly gliders” and even some on flying cross country or racing, but few on how to soar. I want to engage those people who are passionately interested in the way sun, wind, terrain and the airmass combine to create all the varied patterns of air movement that we collectively call “lift”. Ridge, thermal, wave and convergence lift are all familiar to soaring pilots, but to look ahead at the sky and predict what will happen as you fly through it has always been a hard skill to acquire. Fear not, it isn’t a black art and no talent is required, except for a hunger to know what is going on. There is a solid, well understood body of knowledge and a set of well proven techniques that you can employ to play the great game of soaring successfully and safely, in all kinds of terrain, and in all types of lift.
This knowledge may exist already, but it isn’t widely disseminated. Yes, there are books, videos and magazine articles, and plenty of stuff on the internet. But is difficult to dig out the information in any coherent way that hangs together as a set of lessons, any scheme that makes it easy to learn and to make progress with your flying.
I believe that you should should learn and teach in a logical progression: from the easy to the difficult, and from the known to the unknown. Straightforward concepts and easily remembered, clear images help this rather abstract soaring stuff stick in the mind to be recalled when you need it. And when it comes to the science of how the air masses behave it’s important not to get too deeply involved in the maths and the physics. Leave that to the meteorologists: we only need to find the rising air. - G Dale